

The Unit For Velocity Is
| Velocity | |
|---|---|
 Every bit a alter of direction occurs while the racing cars plow on the curved track, their velocity is non abiding. | |
| Common symbols | v , five , 5 → |
| Other units | mph, ft/s |
| In SI base units | one thousand/due south |
| Dimension | L T −i |
Velocity is the directional speed of a object in motion as an indication of its rate of change in position as observed from a particular frame of reference and as measured past a detail standard of time (e.g. 60 km/h northbound). Velocity is a fundamental concept in kinematics, the co-operative of classical mechanics that describes the motility of bodies.
Velocity is a physical vector quantity; both magnitude and direction are needed to ascertain information technology. The scalar absolute value (magnitude) of velocity is called speed, beingness a coherent derived unit whose quantity is measured in the SI (metric organization) as metres per second (one thousand/s or m⋅s−1). For example, "5 metres per 2nd" is a scalar, whereas "5 metres per second eastward" is a vector. If there is a change in speed, direction or both, then the object is said to be undergoing an acceleration.
Abiding velocity vs acceleration
To have a constant velocity, an object must accept a constant speed in a abiding direction. Abiding management constrains the object to motility in a direct path thus, a abiding velocity means motion in a straight line at a constant speed.
For example, a car moving at a abiding twenty kilometres per hour in a round path has a constant speed, simply does not have a constant velocity because its direction changes. Hence, the automobile is considered to be undergoing an acceleration.
Deviation between speed and velocity

Kinematic quantities of a classical particle: mass grand, position r, velocity v, dispatch a.
Speed, the scalar magnitude of a velocity vector, denotes but how fast an object is moving.[i] [2]
Equation of motion
Average velocity
Velocity is defined equally the rate of modify of position with respect to time, which may likewise exist referred to as the instantaneous velocity to emphasize the distinction from the boilerplate velocity. In some applications the boilerplate velocity of an object might be needed, that is to say, the abiding velocity that would provide the same resultant displacement every bit a variable velocity in the same time interval, v (t), over some time menstruation Δt . Average velocity tin be calculated as:

The average velocity is ever less than or equal to the average speed of an object. This can be seen by realizing that while distance is always strictly increasing, displacement can increase or subtract in magnitude as well every bit change direction.
In terms of a displacement-time (x vs. t) graph, the instantaneous velocity (or, simply, velocity) can be idea of every bit the slope of the tangent line to the curve at any point, and the boilerplate velocity as the slope of the secant line betwixt two points with t coordinates equal to the boundaries of the fourth dimension catamenia for the average velocity.
The average velocity is the same every bit the velocity averaged over fourth dimension – that is to say, its time-weighted average, which may be calculated as the time integral of the velocity:

where we may place

and

Instantaneous velocity
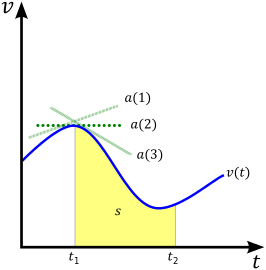
Example of a velocity vs. time graph, and the human relationship between velocity v on the y-axis, acceleration a (the three green tangent lines represent the values for acceleration at dissimilar points forth the curve) and displacement s (the yellow area nether the curve.)
If we consider 5 as velocity and 10 equally the displacement (change in position) vector, so we can express the (instantaneous) velocity of a particle or object, at whatever detail time t , every bit the derivative of the position with respect to fourth dimension:

From this derivative equation, in the one-dimensional example it tin exist seen that the area under a velocity vs. time ( 5 vs. t graph) is the displacement, x . In calculus terms, the integral of the velocity function v (t) is the deportation function x (t). In the figure, this corresponds to the xanthous area under the bend labeled due south ( s existence an alternative notation for displacement).

Since the derivative of the position with respect to time gives the change in position (in metres) divided past the modify in time (in seconds), velocity is measured in metres per 2nd (one thousand/s). Although the concept of an instantaneous velocity might at first seem counter-intuitive, it may exist idea of as the velocity that the object would proceed to travel at if it stopped accelerating at that moment.
Relationship to dispatch
Although velocity is defined as the rate of change of position, it is oft common to start with an expression for an object'south acceleration. As seen by the three green tangent lines in the effigy, an object's instantaneous acceleration at a signal in time is the slope of the line tangent to the curve of a v (t) graph at that point. In other words, acceleration is defined as the derivative of velocity with respect to fourth dimension:

From there, we can obtain an expression for velocity as the area under an a (t) acceleration vs. fourth dimension graph. As above, this is done using the concept of the integral:

Constant acceleration
In the special instance of constant acceleration, velocity tin exist studied using the suvat equations. By considering a as being equal to some arbitrary constant vector, it is trivial to prove that

with v every bit the velocity at time t and u equally the velocity at time t = 0. By combining this equation with the suvat equation x = ut + at ii/two, it is possible to relate the displacement and the average velocity by

It is besides possible to derive an expression for the velocity independent of time, known as the Torricelli equation, equally follows:



where v = | 5 | etc.
The above equations are valid for both Newtonian mechanics and special relativity. Where Newtonian mechanics and special relativity differ is in how unlike observers would describe the same state of affairs. In detail, in Newtonian mechanics, all observers hold on the value of t and the transformation rules for position create a situation in which all non-accelerating observers would describe the acceleration of an object with the same values. Neither is truthful for special relativity. In other words, only relative velocity tin can be calculated.
Quantities that are dependent on velocity
The kinetic energy of a moving object is dependent on its velocity and is given by the equation

ignoring special relativity, where East k is the kinetic energy and m is the mass. Kinetic energy is a scalar quantity as it depends on the foursquare of the velocity, however a related quantity, momentum, is a vector and defined by

In special relativity, the dimensionless Lorentz factor appears ofttimes, and is given by

where γ is the Lorentz gene and c is the speed of light.
Escape velocity is the minimum speed a ballistic object needs to escape from a massive body such as Globe. Information technology represents the kinetic free energy that, when added to the object'south gravitational potential energy (which is always negative), is equal to zero. The general formula for the escape velocity of an object at a distance r from the center of a planet with mass M is

where G is the gravitational constant and g is the gravitational acceleration. The escape velocity from Earth's surface is most 11 200 1000/due south, and is irrespective of the direction of the object. This makes "escape velocity" somewhat of a misnomer, equally the more correct term would be "escape speed": any object attaining a velocity of that magnitude, irrespective of temper, volition leave the vicinity of the base body as long as information technology doesn't intersect with something in its path.
Relative velocity
Relative velocity is a measurement of velocity between 2 objects as determined in a unmarried coordinate system. Relative velocity is fundamental in both classical and modern physics, since many systems in physics deal with the relative move of two or more particles. In Newtonian mechanics, the relative velocity is contained of the called inertial reference frame. This is not the instance anymore with special relativity in which velocities depend on the selection of reference frame.
If an object A is moving with velocity vector five and an object B with velocity vector westward , and then the velocity of object A relative to object B is defined equally the difference of the two velocity vectors:

Similarly, the relative velocity of object B moving with velocity w , relative to object A moving with velocity v is:

Commonly, the inertial frame called is that in which the latter of the two mentioned objects is in balance.
Scalar velocities
In the one-dimensional instance,[3] the velocities are scalars and the equation is either:
- , if the two objects are moving in opposite directions, or:
- , if the two objects are moving in the aforementioned direction.


Polar coordinates

Representation of radial and tangential components of velocity at different moments of linear motion with constant velocity of the object effectually an observer O (information technology corresponds, for example, to the passage of a automobile on a straight street around a pedestrian standing on the sidewalk). The radial component can be observed due to the Doppler effect, the tangential component causes visible changes of the position of the object.
In polar coordinates, a two-dimensional velocity is described by a radial velocity, defined every bit the component of velocity away from or toward the origin (too known as velocity made practiced), and an angular velocity, which is the rate of rotation well-nigh the origin (with positive quantities representing counter-clockwise rotation and negative quantities representing clockwise rotation, in a right-handed coordinate system).
The radial and angular velocities can be derived from the Cartesian velocity and displacement vectors by decomposing the velocity vector into radial and transverse components. The transverse velocity is the component of velocity along a circle centered at the origin.

where
The magnitude of the radial velocity is the dot production of the velocity vector and the unit vector in the management of the displacement.

where is displacement.

The magnitude of the transverse velocity is that of the cross product of the unit vector in the direction of the displacement and the velocity vector. It is too the product of the angular speed and the magnitude of the deportation.


such that

Athwart momentum in scalar class is the mass times the altitude to the origin times the transverse velocity, or equivalently, the mass times the distance squared times the athwart speed. The sign convention for angular momentum is the same as that for angular velocity.

where
The expression is known as moment of inertia. If forces are in the radial direction only with an inverse square dependence, as in the instance of a gravitational orbit, athwart momentum is abiding, and transverse speed is inversely proportional to the altitude, angular speed is inversely proportional to the distance squared, and the rate at which expanse is swept out is constant. These relations are known as Kepler'due south laws of planetary motion.

See also
- Four-velocity (relativistic version of velocity for Minkowski spacetime)
- Group velocity
- Hypervelocity
- Phase velocity
- Proper velocity (in relativity, using traveler fourth dimension instead of observer fourth dimension)
- Rapidity (a version of velocity additive at relativistic speeds)
- Terminal velocity
- Velocity vs. time graph
Notes
- ^ Rowland, Todd (2019). "Velocity Vector". Wolfram MathWorld. Retrieved two June 2019.
- ^ Wilson, Edwin Bidwell (1901). Vector assay: a text-book for the use of students of mathematics and physics, founded upon the lectures of J. Willard Gibbs. Yale bicentennial publications. C. Scribner's Sons. p. 125. hdl:2027/mdp.39015000962285. Primeval occurrence of the speed/velocity terminology.
- ^ Basic principle
References
- Robert Resnick and Jearl Walker, Fundamentals of Physics, Wiley; 7 Sub edition (June 16, 2004). ISBN 0-471-23231-nine.
External links
![]()
Wikimedia Commons has media related to Velocity.
- Velocity and Dispatch
- Introduction to Mechanisms (Carnegie Mellon University)

The Unit For Velocity Is,
Source: https://en.wikipedia.org/wiki/Velocity
Posted by: harisowayll.blogspot.com
0 Response to "The Unit For Velocity Is"
Post a Comment